
NAIST Robotics Laboratory
Pioneer 3

Pioneer 3は,MobileRobots Inc.が開発した,汎用性の高い知能機動型ロボットシステムです.
ソナーなどのセンサが搭載されています.
研究事例
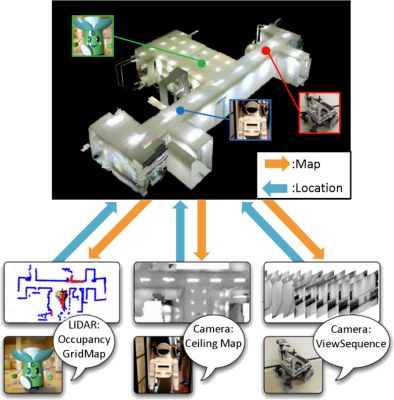
2011年には人と共存可能な移動ロボットシステムの研究を行いました.この研究では複数のロボット間で座標を統一したり,周囲の人間の位置情報を統一することで自己位置推定の精度を向上させました.
タッチインターフェースを利用した移動ロボットの遠隔操作
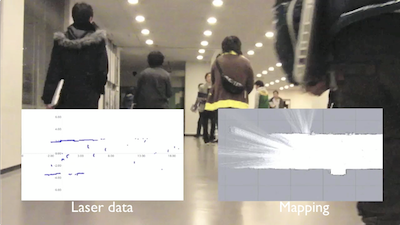
2012年には動的環境におけるリアルタイム地図生成の研究を行いました.この研究ではSLAM(Simultaneous Localization and Mapping:自己位置推定と地図生成を同時に行う手法)を,例えば人混みの中などの動的な環境に適用できるようにL0ノルムを利用しました.
人と共存可能な移動ロボットシステム
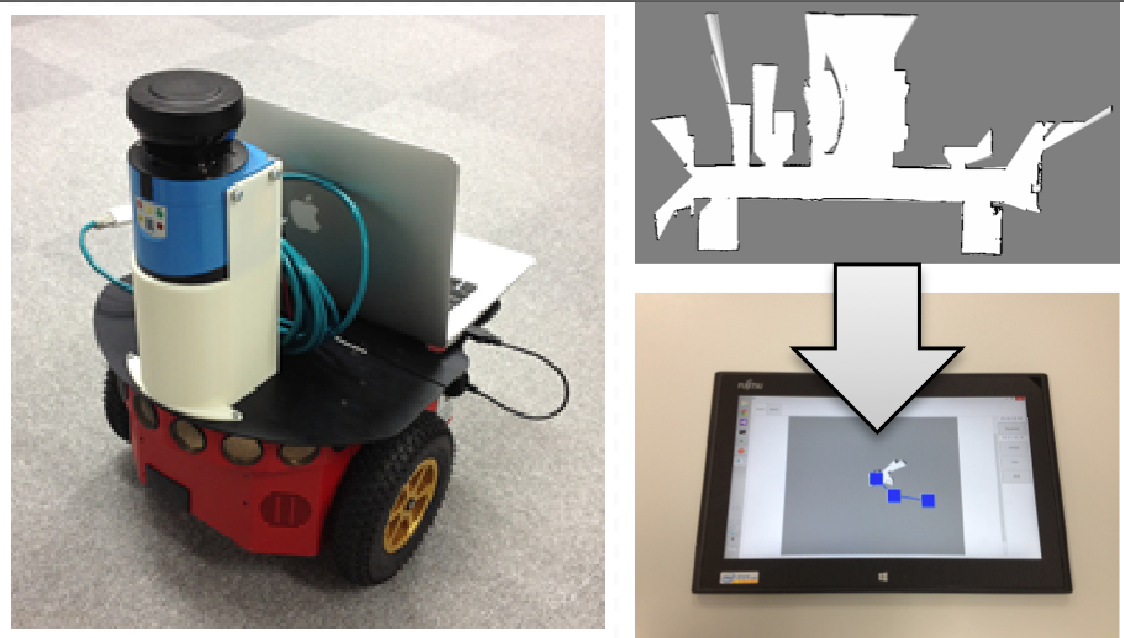
2013年にはタッチインターフェースを利用した移動ロボットの遠隔操作の研究を行いました.従来の遠隔操作ロボットは操作に慣熟する必要があり,また,1人で1台しか操作できないという欠点を抱えていました.この研究ではタブレット端末を利用することで,簡単な操作で複数台を同時に操作できるシステムを構築しました.
動的環境におけるリアルタイム地図生成
キーワード
移動ロボット