
NAIST Robotics Laboratory
アフェクティブロボット
~人の手と同じ感覚でのコミュニケーションを目指して~
近年,タッチケア,ユマニチュードなどの触れる技術に注目が集まっています.触れることによって,疼痛の緩和,不安の軽減等につながり,快の反応を引き出す効果があると報告されています.私たちは,この触れる技術をロボットによって実現することを目指しています.
本研究では,人の手を模したハンドの製作と優しい撫で動作の生成を行い,ロボットの撫で動作によって快の反応を引き出すことが可能か検討しています.また,人の撫で動作と比較することによって,ロボットの性能を主観的・生理的に評価しています.
1.タッチケアロボットのためのエンドエフェクタ
硬さや機能に人らしくない「不自然な情報」が少なく,接触面積が人の手で触れるときの広さと同程度のエンドエフェクタが理想的であると考えています.
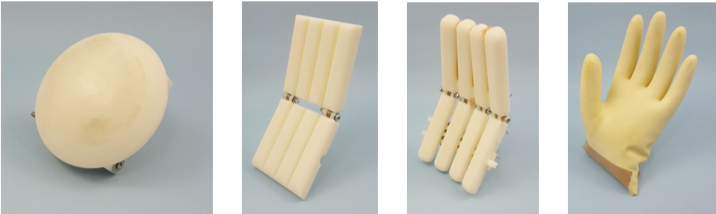
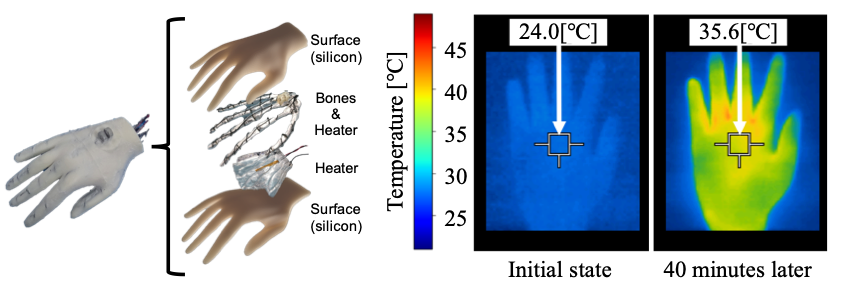
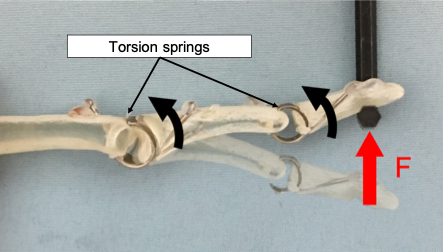
2.温度制御可能な受動機構を有する柔軟手
人の骨の剛性と関節,人肌の感触,人の温かさを再現したハンドの開発を行っています.
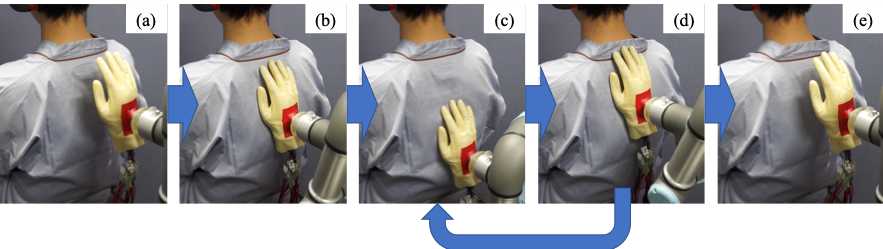
3.優しい撫で動作
一定圧力,速度で安全に優しく撫でる動作の開発を行っています.
主要関連論文
- Kenta Toyoshima, Ming Ding, Jun Takamatsu, and Tsukasa Ogasawara: “What is Required for a Robot to Gently Stroke a Human using its Hand”, Proceedings of ICRA2018 Workshop on Elderly Care Robotics Technology and Ethics, 2018.
- 北村 勇希, 清川 拓哉, 丁 明, 高松 淳, 小笠原 司:“タッチケアロボットのための温度制御可能な受動機構を有する柔軟指の開発”, 第36回日本ロボット学会学術講演会(RSJ2018), 2D1-01, 2018.
- 石倉 智貴, 湯口 彰重, 北村 勇希, 趙 崇貴, 丁 明, 高松 淳, 佐藤 弥, 吉川 左紀子, 小笠原 司:“人の手を模したハンドを用いた優しい撫で動作の主観的,生理学的評価”, 日本機械学会ロボティクス・メカトロニクス講演会2020 (ROBOMECH2020), 1P1-N06, 2020.
謝辞
本研究は,JSPS 科研費JP17K13088,JP19H01123,JST CREST JPMJCR17A5,およびJSTけいはんなリサーチコンプレックス事業の支援を受けたものである.